Heute das Handtuch nicht vergessen:
Sonntag, 24. Mai 2026
Towel Day
Montag, 11. August 2025
Quellimpedanz für ADC
Dienstag, 25. April 2023
Berlin-Uhr alias "Mengenlehreuhr"
Dienstag, 10. Januar 2023
Drehgeberauswertung mit Beschleunigung
Donnerstag, 25. November 2021
Entkopplung
Was ist "Entkopplung"
Ein heisses Thema sind Blockkondensatoren oder Entkopplungskondensatoren oder Pufferkondensatoren an integrierten Schaltkreisen. Manch einer nimmt noch immer den altbewährten 100nF und dazu eine Anschlusstechnik aus einem Lehrbuch von 1980: irgendwie in die Nähe des ICs. Das hat bei den damals verfügbaren langsamen und wenig komplexen ICs auch ausgereicht ("langsam" bedeutet hier übrigens nicht "niedrige Taktfrequenz", sondern "langsame Flankenansteigszeit wegen hochohmiger Transistoren").
Heute haben ICs aber viele interne Komponenten und dementsprechend viele Flipflops, die gleichzeitig schalten und beim Umschalten durch das Umladen der nachfolgenden Eingangskapazitäten Stromspitzen erzeugen. Die Versorgung des ICs muss 1. diese Stromspitzen bereitstellen und 2. dafür sorgen, dass sie nicht in die weite Welt hinaus abgestrahlt werden. Für beide Aufgaben ist hier der Entkopplungskondensator wichtig. Im 1. Fall stellt er niederimpedant den Strom für die Funktion des ICs zur Verfügung, und im 2. Fall sorgt er dafür, dass diese schnellen Stromänderungen nur ganz lokal passieren.
Wie auch beim Layout von Schaltreglern geht es darum, die Stromschleifen, auf denen solche schnellen Stromänderungen passieren, möglichst klein zu halten, dass sie niederimpedant sind (der Amerikaner sagt: "Each mm has its nH") und sie aufgrund ihrer geringen Größe nicht als Störsender wirken können.
Dazu einige wichtige Grundlagen (es kann nicht schaden, diese allgemein gültigen Regeln zu kennen und IMMER im Hinterkopf zu behalten):
1. Regel
Wo ein Strom rausfließt muss auch ein genau gleich großer wieder rein.
Diese "beiden Ströme" sind ein und der selbe Strom.
Dieser Strom soll möglichst ohne Umwege "im Kreis" fließen können.
2. Regel
Leiterbahnschleifen sind Spulen und Spulen sind Elektromagnete und Antennen.
Im Allgemeinen wollen wir keine Elektromagnete und Funkgeräte auf Platinen bauen.
3. Regel
Ein Kondensator ist gleichzeitig auch ein Widerstand und eine Spule.
Seine Impedanzkurve hat deswegen eine Frequenzabhängigkeit.
Entkoppelkondensatoren versorgen ICs im ns-Bereich mit Strom. Sie puffern (deshalb auch Pufferkondensator) die Stromspitzen, die entstehen, wenn Ausgänge von CMOS-Flipflops im IC ihren Pegel umschalten. Deren Ausgangstreiberstufen müssen die Umladeströme für den nächsten CMOS-Eingangs-Kondensator liefern. Weil meist im ganzen IC ein Takt (oder davon abgeleitete synchrone Takte) verwendet werden, schalten viele Flipflops im IC gleichzeitig. Daraus resultieren schnelle Stromänderungen an den Versorgungsanschlüssen des ICs, die einen kurzen und induktivitätsarmen Anschluss des Entkoppelkondensators erfordern.
Für einen "durchschnittlichen" Schaltkreis wie z.B. einen uC, in dem viele Komponenten (Speicher, Alu, Schnittstellen, Timer...), untergebracht sind, gelten diese Betrachtungen:
So sollte man es nicht machen:
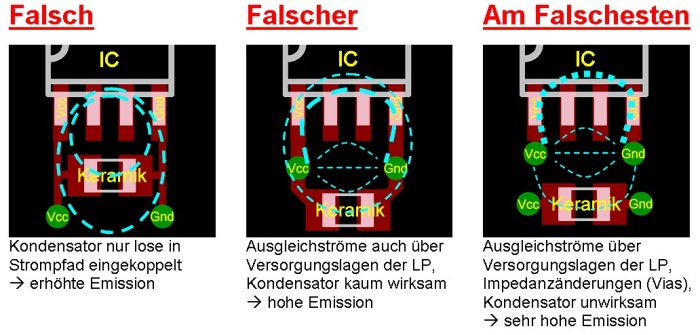
Das rechte Beispiel birgt im Besonderen die Gefahr, dass der Blockkondensator den Bezug zu "seinen beiden" Versorgungspins verliert, weil er im Laufe des Layouts (wenn man immer mehr Leitungen zwischen den Kondensator und "seine" Versorgungsanschlüsse zwängen muss) irgendwie immer weiter vom IC wegwandert.
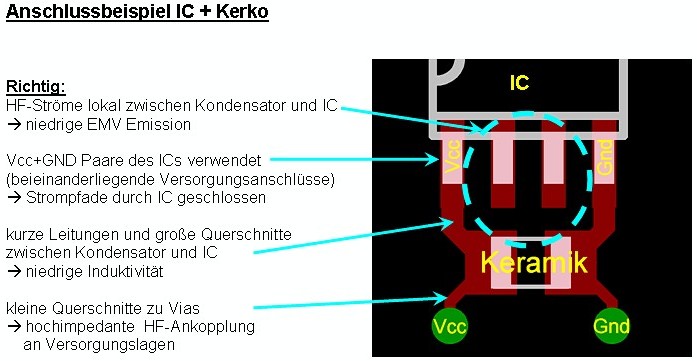
So sieht z.B. eine brauchbare Entkopplung eines ICs aus:

Hier darf der Tantalkondensator natürlich auch weiter weg auf der Platine sitzen, da er nur noch niederfrequente Stromänderungen zu bedienen hat.
Bei vielen ICs sind für eine einfache Entkopplung die Versorgungspins paarweise herausgeführt. Das haben die Chipdesigner nicht zum Zeitvertreib gemacht, sondern damit die Blockkondensatoren optimal angeschlossen werden können. Eine gute Abblockung eines uCs gegen die Versorgung könnte so aussehen:
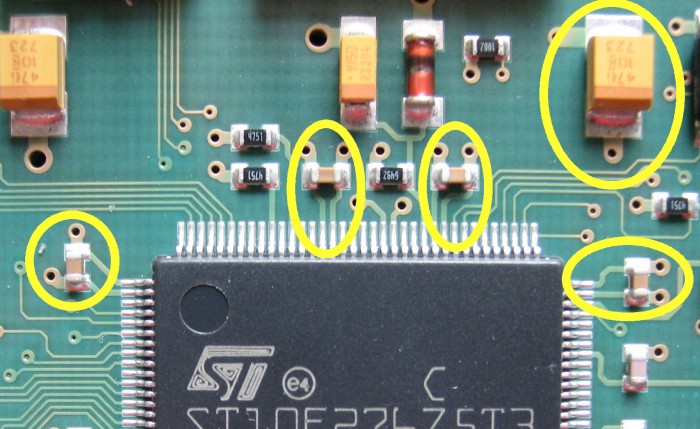
Diese Desings sind 4-lagig, die Durchkontaktierungen gehen direkt auf die jeweilige Versorgungslage.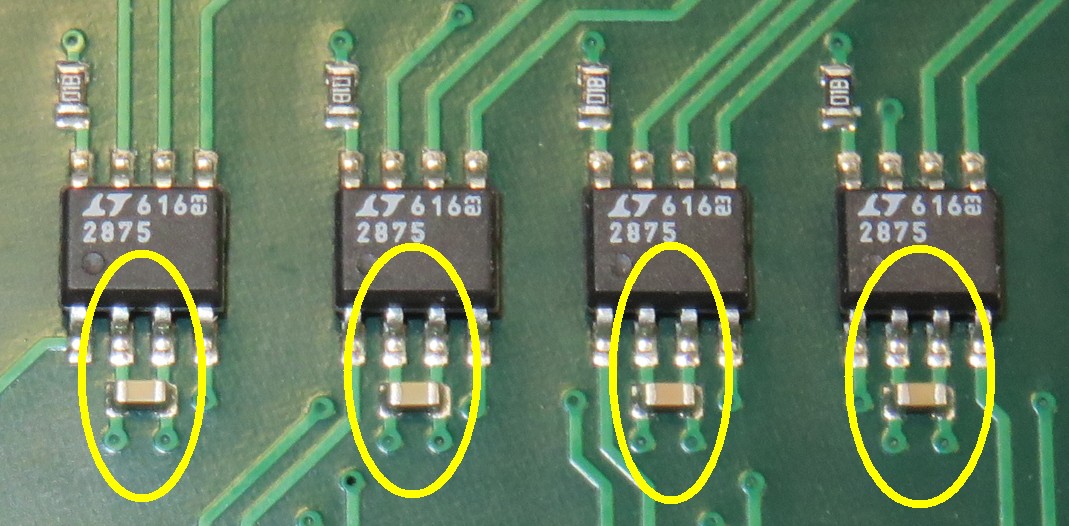
SMD-Kondensatoren im 0402 oder auch 0201 Format erlauben eine Platzierung ganz dicht an den Bauteilpins: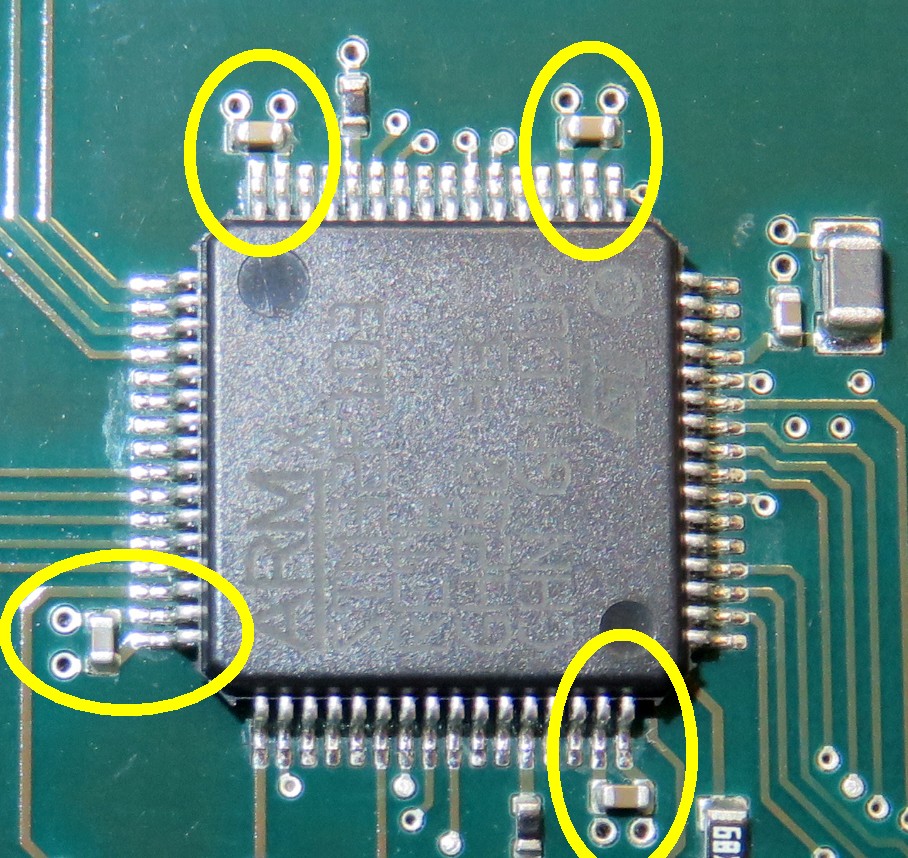
Natürlich ist das ganze Thema namens Power Integrity bändeweise buchfüllend und die Entkopplung muss bei anderen Anforderungen auch entsprechend angepasst werden. So ist z.B. beim Anschluss von BGAs logischerweise ein anderes Entkopplungs- und Versorgungskonzept nötig, weil dort ein Versorgungspin natürlich erst auf die Versorgungsfläche durchkontaktiert und dann diese lokale Versorgungsfläche entkoppelt wird. Aber die Grundlagen sind die selben: kleine Stromschleifen, kleine Impedanzen.
Ströme über IO-Pins
Natürlich darf bei der Betrachtung des Themas "Entkopplung" nicht vergessen werden, dass auch aus den IC-Augangspins Ströme heraus und in andere IC-Eingangspins hinein fließen. Auch diese Ströme müssen wieder zurück zum treibenden IC, weil jeder Stromkreis geschlossen ist. Bei sehr IO-lastigen Anwendungen mit schnellen (steilflankigen) Ein- und Ausgängen (z.B. DDRAM) muss dementsprechend die Entkopplung einen Schritt zurücktreten und es müssen vorrangig die Strompfade auf der Masse und in der Versorgungslage zwischen den beteiligten ICs optimiert und verkürzt werden. In diesem Fall ist dann auch nicht der IC der potentielle Störer, sondern die Datenübertragung zwischen den ICs.
Versorgungskonzept
Darüber hinaus muss VOR dem Entkoppeln der ICs von der Versorgung ein vernünftiges Versorgungskonzept auf der Platine erstellt sein. "Versorgung" bedeutet übrigens nicht nur "Masse", sondern eben auch Vcc (oder V+ oder Vdd oder wie die auch immer heißen mag). Es hilft nicht, wenn der Pufferkondensator auf 1mm an die Versorgungspins platziert wurde, wenn dann die Verbindung zwischen mehreren solcher Versorgungspärchen auf der Leiterplatte nur mit dünnen Leitungen über Umwege erfolgt. In diesem Fall können sich zwischen den Versorgungspärchen Potentialverschiebungen ergeben, die die Funktion des ICs beeinträchtigen.
Zusammengefasst:
Es muss also beim Layout zuallererst eine "stabile" Masse- und Vcc-Anbindung hergestellt werden.
Von dieser Versorgung wird dann der angeschlossene IC mit den oben beschriebenen Maßnahmen entkoppelt.
Ein Kompromiss
Weil jedes Layout irgendwie immer einen Kompromiss darstellt, sollte man das Ganze nicht unnötig auf die Spitze treiben. Für eine "übliche" Mikrocontrollerschaltung z.B.
mit einem AVR oder PIC Controller reicht es meist aus, wenn überhaupt ein Blockkondensator
in der Nähe der ICs sitzt. Besser als gar nichts ist das auf jeden
Fall...
Zu diesem Thema finden sich interessante und durchaus kontroverse Diskussionen auf dem mikrocontroller.net:
www.mikrocontroller.net: Abblockkondensatoren, wie routen?
und den
www.mikrocontroller.net: Abblockkondensator 1 µF oder 100 nF besser?
und auch den hier
www.mikrocontroller.net: Abblockkondensator bei gegenüberliegenden Pins für VCC und GND
Original vom 9.10.2008
(Seite 1 von 20, insgesamt 97 Einträge)
nächste Seite